| 入力むだ時間を含む制御対象を同定する方法として,MATLABのdelayestが知られているが,これは一入力一出力(SISO)でモデルの次数が既知でないと使用できない。 また,時定数がむだ時間より長い系では正確に同定することができない。それを解決するために,入出力の対応を1ステップずつずらした入出力データを部分空間同定法で同定し,系の次数が変動しなくなったステップ数をむだ時間として系の次数とむだ時間を同時に同定することを提案し,良好な結果が得られた。 時定数がむだ時間より長い系ではモデルの次数の変化が緩慢となる。同定されたモデルの不安定ゼロ点に着目し,不安定ゼロ点がなくなるステップ数でも同様に系の次数とむだ時間を同時に同定することができる。 |
| |
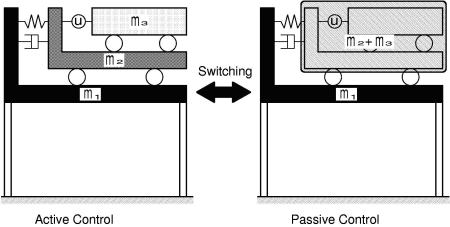
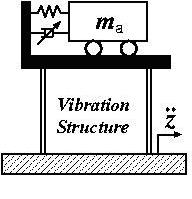
| 建物や機器の振動制御の問題を扱う。振動制御にはパッシブな動吸振器を付加する方法やアクチュエータを付けてアクティブに制御する方法などが多数提案されている。ここではアクチュエータを製作し,フィードバック制御によって振動を抑える問題 を考える。実験は振動実験解析棟および実験室内の振動台を使って行う。アクティブ制御とパッシブ制御を切換えることで,制振効果を高める制御方法を研究する。 |
 |
 |
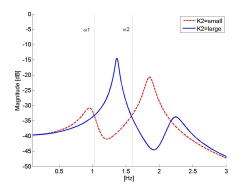 |
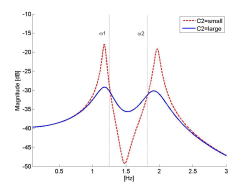
| 付加質量を用いたパッシブ制振では動吸振器がよく知られている。動吸振器の共振曲線は減衰係数によって振幅率が異な り,一般に最大倍率が小さい方が性能がよいとされてい る。しかし,反共振周波数においてはむしろ減衰係数が 小さい方が応答倍率は小さくなる。そこで,バンドパス フィルタ(BPF) を用いて構造物の変位の周波数成分に よって減衰係数を切り替えるセミアクティブ制御を行い,さまざまな地震波に対して有効な制振を行う。 ばね係数が変わるとピークの周波数が変わる。構造物の周波数成分によってばね係数を切り替えるセミアクティブ制御を行う。 | ||
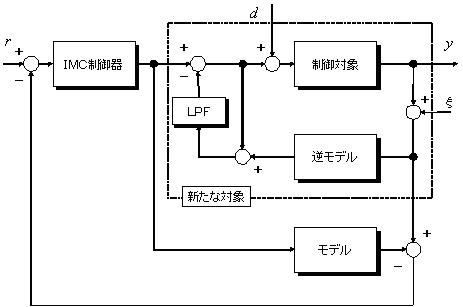 |
| 制御対象物とセンサ,アクチュエータの間に時間的な遅れがあるシステムをむだ時間系という。時間遅れがある制御問題は理論的にはずいぶん解析されてきているが,実際のシステムへの適用はまだ十分ではない。数値計算ソフト(Matlab)でむだ時間系の解析と制御系設計のツールを作り,ペルチェ素子を使った冷却システムの温度制御と疑似的にむだ時間を挿入した倒立振子を状態予測制御を用いて倒立制御を行っている。
上図は,外乱オブザーバを併合した内部モデル制御のブロック線図である。外乱オブザーバを併合したプラントを新たな制御対象と考えて,閉ループ同定と内部モデル制御の繰り返し設計によって,外乱を抑えながら制御性能を上げることができる。 |
|
研究テーマとは関係ないが,研究室の環境について簡単にコメントしておく。 学科のWebサーバとメールサーバを管理している。大学のPCとは別のサーバを管理することで,ゼミ分けをホームページ上から行なったり,学科用のグループウエアソフトを導入して,効率化をはかっている。 学外からアクセス可能なサーバの管理を行っている。 |