|
|
|
回転型倒立振子
振り上げは開ループです。倒立は普通の状態フィードバック制御(LQR)です。
入力にむだ時間が含む場合の失敗例(振子と倒立)です。
入力むだ時間成功例(振子と倒立)です。状態予測制御を用いています。
|
|
Experimental Evaluation on Strictly Proper Approximation of State Predictor for inverted Pendulum, Proc. 7th IFAC Workshop on Time delay systems, TDS07(2007)
|
|
フレキシブルアーム回転型倒立振子
アームが振動モードを持つ場合です。 振り上げは開ループで行っています。 倒立は周波数重み付きLQR制御です。振動モードを励起させていません。
入力むだ時間を含む場合は状態予測制御を用いています。状態予測制御の積分近似の手法を変えています。
|
|
Experimental Comparison of the Integral Approximation for the State Predictive Control - the Stabilization Control of the Inverted Pendulum with Flexible Arm - (2019)
|
|
振動系台車型倒立振子
ボールねじ上にばねが付いた台車がある倒立振子です。 倒立は周波数重み付きLQR制御です。振動モードを励起させていません。
入力むだ時間を含む場合は状態予測制御を用いています。状態予測制御の積分近似の手法と分割数を変えています。
|
状態予測制御を用いたむだ時間及び振動系を含む直動型倒立振子の安定化制御,第62回自動制御連合講演会(2019)
入力むだ時間系に対する部分空間同定法を用いた離散時間状態予測制御,システム制御情報学会論文誌,35 巻4 号,p.75-83(2022) |

|
並列2リンク回転型倒立振子
一つのモータで2本の倒立振子を安定化しています。
状態フィードバックゲインは試行錯誤で求めています。
|
|
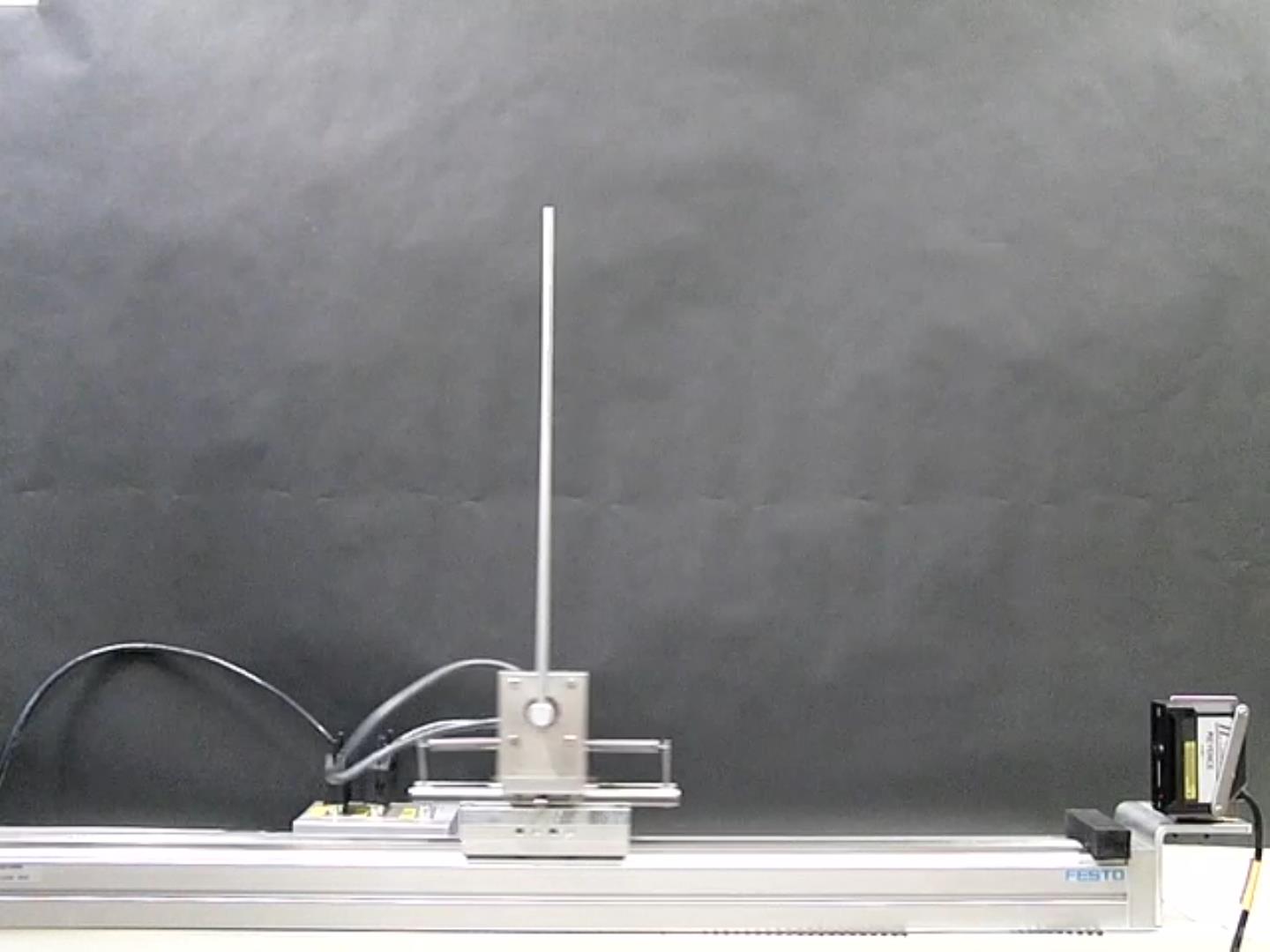
三軸姿勢制御モジュール
X方向,Y方向,θ方向(Z軸回転)をロータで制御しています。
逆さまにすると制振制御
・自由振動 ,PD制御(X,Y,θを独立に制御)
・部分空間同定法によるLQG制御
倒立制御
・PD制御(X,Y,θを独立に制御)
・倒立状態で部分空間同定法で同定後,LQG制御
|
|
|
